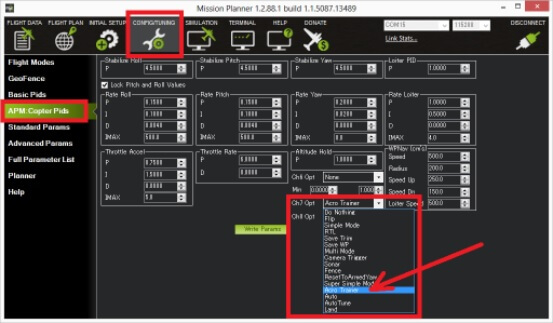
特技模式
特技模式(速率模式)使用遥控器控制杆来控制飞行器的角速度。 松开控制杆,飞行器将保持目前的状态,而不是回到水平。 特技模式下可进行特技飞行,如翻转或滚动,或FPV。
特技模式操作难度较大,如非必要请不要使用;使用该模式前请做好炸机的心理准备。
特技模式是仅基于速率控制的模式。
特技模式提供了遥控器摇杆到飞行器电机之间的最直接的控制关系。
在特技模式下飞行,就像是不装飞控的遥控直升机一样,需要持续不断的手工摇杆操作。
概述
节气门是完全手动的,无法纠正飞行器的倾斜角度。 如果飞手将油门完全打下,电机将达到最低转速;但是,可以通过启用
AirMode更改此行为
AC3.1及更高版本包含“特技训练”功能,可以打开/关闭,使学习者更容易进行特技飞行。
“body frame”中解释并执行油门杆输入(与之相对的是运动模式中的“earth frame”)。 当飞行器倾斜时,“body frame”和“earth frame”之间的差异是最明显的。 例如,当以45度向前倾斜时,如果使用“earth frame”控制器(即运动模式),则应用左偏航时,飞行器将在其航向变化时保持俯仰角和侧倾角不变。 使用像特技模式的“body frame”控制器,它将围绕飞行器的垂直轴线旋转,意味着俯仰角角将成为侧倾角角,侧倾角将成为俯仰角。
Acro是最难掌握的飞行模式,可能需要几次炸机后才能掌握它。尽管Acro模式不一定需要GPS,但在紧急情况下需要切换到RTL。设防之前,请确保您确实有可靠的位置估计,通常由具有足够HDOP的3D GPS修复程序提供。
细节
特技模式有两种类型:默认的模式是基于地面坐标系的比率控制(AXIS_ENABLE = 1)。第二是基于飞行器本体三个轴的转速比率控制(AXIS_ENABLE = 0)。如果自我平衡能力不好,不建议用这种高难度模式飞行。
特技模式下飞行器的Roll、Pitch、Yaw三个轴的角速率由摇杆偏移角来控制。
摇杆居中意味着保持当前角度的姿态,也可以在摇杆居中的时候把飞行器控制到水平姿态。
纵倾和侧倾的控制杆会使飞行器在相应的方向产生相应的倾斜角。
为了使飞行器重新恢复水平,各轴摇杆需要向相反方向推。
为了维持飞行水平,各轴控制摇杆需要不停地调整。
缺省模式有两个参数。以百分比的形式表示,各自乘以当前的滚转角和俯仰角,然后得到回到水平位置所需要的角速度。
偏航控制杆的操纵方式,同稳定状态下的操纵方式相同。
油门杆也是直接按照杆量加速或者减速控制控制四个电机。
油门也需要不停地修正以维持飞行高度。
空中模式
可以设置Acro模式以在怠速油门时提供完全稳定。请参阅AirMode
特技训练
ACRO_TRAINER参数可以设置为:
0 =禁用。 这意味着飞手在全速率控制下操作,因为没有自动调平所以对自动驾驶仪的角度没有限制。
1 =自动调平。 当飞手松开控制时,飞行器将自动返回到水平位置。 可以使用ACRO_BAL_ROLL和ACRO_BAL_PITCH参数来控制其返回到级别的攻势。 默认值1.0将使其返回到最高的水平(30deg / sec)。 越高的值使其返回得越快。
2(默认)=自动调平和倾斜角限制。 包括作为选项#1的自动调平,但另外飞行器不会倾斜超过45度(该角度可以使用ANGLE_MAX参数进行配置)。
可以使用Ch7 / Ch8开关启用/禁用特技训练者。 使用3位置切换关闭位置(即PWM <1200)将禁用训练者,中间位置将启用选项#1(自动调平),顶部位置(即PWM> 1800)将启用选项#2(调平和倾斜角度 有限)。 2位开关只能选择#0(禁用)和选项#2(调平和限制)。
调试
- ACRO_RP_P控制横摇和俯仰轴的旋转速率。默认值为4.5,将命令200deg / sec的旋转速度。值越高旋转速度越大。
- ACRO_YAW_P控制偏航轴的旋转速率。默认值4.5(如滚动和俯仰)将命令200deg / sec的旋转速度。
- ACRO_RP_EXPO和 ACRO_Y_EXPO是仅适用于ACRO模式的应用于操纵杆输入的指数量。默认情况下,即使在中间操纵杆位置,ACRO模式也比其他模式响应更快,因此此参数允许飞行员在控件中微调操纵杆响应,以使其与其他模式(例如,例如Stabilize,AltHold,PosHold等。默认值0将30%的曝光应用于飞行员的侧倾和俯仰要求。
高级调整参数
当您对ACRO模式飞行非常熟练后,您可能需要根据无人机的性能特征进行更深入的调整。
这些参数是适用于所有飞行模式的全局参数,而不仅仅是ACRO。
ATC_ACCEL_R_MAX和 ATC_ACCEL_P
- ATC_ACCEL_R_MAX和 ATC_ACCEL_P_MAX:横摇/俯仰轴上的最大加速度,以摄氏度/秒/秒为单位。假设您有一个高度灵活的四轴飞行器,并且您的ACRO_RP_P参数设置为9,这意味着滚动请求约为400deg / sec。如果没有短暂的加速,直升机在物理上就无法从0deg / sec变为400deg / sec。在此期间,为了使您的速度达到400deg / sec,控制器中会出现错误。当您松开摇杆时,该错误仍然可能存在,导致所需姿势的超调,然后反弹。可以调整此参数以帮助消除操纵过程中的错误,并在不消除反弹的情况下使其软化。请注意,这与调整“俯仰和滚转”的“比率D”项完全不同,并且仅在适当调整这些项之后才能出现。
- ATC_ACCEL_Y_MAX:偏航轴上的最大加速度,以摄氏度/秒/秒为单位。与ATC_ACCEL_R_MAX和 ATC_ACCEL_P_MAX相同的原理:螺距的加速度最大值, 但在YAW轴上基于 ACRO_YAW_P
参数值(可能更低,更容易获得)。