扩展卡尔曼滤波器(EKF)
直升机和固定翼可以使用扩展卡尔曼滤波器(EKF)算法,基于速率陀螺仪,加速度计,罗盘,GPS,空速和大气压力测量来估计飞机位置,速度和角度方向。
EKF与简单的互补滤波器算法(即“惯性导航”)相比优点在于:通过融合所有可用的测量数据,能够更好的过滤掉有明显误差的测量数据,这使飞机不会受单个传感器故障的影响。 EKF还可以使用诸如光流和激光测距仪等可选传感器进行测量,以辅助导航。
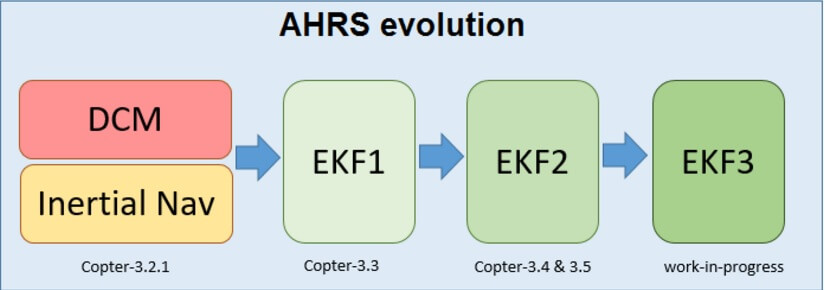
目前稳定版本的ArduPilot使用EKF2作为主要态度和位置估算来源,DCM在后台静止运行。 如果飞行控制器有两个(或多个)IMU可用,则两个EKF“内核”(即EKF的两个实例)将并行运行,每个使用不同的IMU。 飞控会选取一个传感器数据一致性最好,性能最佳的EKF核心作为单个EKF输出使用,其它核心不起输出作用。
大多数用户不需要修改任何EKF参数,但下面的信息提供了一些最常见的参数变化信息。 更详细的信息可以在开发者EKF wiki页面找到。
选择EKF和核心数
AHRS_EKF_USE:设置为“1”以启用EKF,“0”用于姿态控制和惯性导航(Copter-3.2.1)或者用于位置控制的航向推算(平面)。 在Copter-3.3(及更高版本)中,此参数被强制为“1”,不能更改。
AHRS_EKF_TYPE:设置为“2”以使用EKF2进行姿态和位置估算,EKF3为“3”。
EK2_ENABLE,EK3_ENABLE:设置为“1”分别启用EKF2/EKF3。
EK2_IMU_MASK,EK3_IMU_MASK:指定要使用哪些IMU(即加速度计/陀螺仪)的位掩码。 将为指定的每个IMU启动EKF“核心”(即单个EKF实例)。
1:使用第一个IMU启动单个EKF内核
2:仅使用第二个IMU启动单个EKF核心
3:分别使用第一个和第二个IMU启动两个单独的EKF内核
常用参数修改
EK2_ALT_SOURCE哪个传感器用作主高度源
0:使用气压计(默认)
1:使用测距仪。这可以用于气压计数据非常嘈杂并且地面相对平坦的环境(即空调器可能引起突然的压力变化的室内)。如果意图执行地形跟踪,则不应使用。对于以下地形地形,请参阅直升机和平面特定地形遵循说明。
2:使用GPS。当GPS质量非常好并且气压计漂移可能存在问题时有用。例如,如果飞机将执行高度变化> 100m的长途任务。
EK2_ALT_NOISE:默认值为“1.0”。较低的数字减少对加速度计的依赖,增加对气压计的依赖。
EK2_GPS_TYPE:控制GPS的使用方式。
0:使用GPS的3D速度和2D位置
1:使用2D速度和2D位置(GPS速度对高度估计不起作用)
2:使用2D位置
3:无GPS(仅在可用时才使用光流)
如上所述,EKF理论和调整参数的更详细的概述可以在开发人员wiki的扩展卡尔曼滤波器导航概述和调谐上获得。