扩展调参(pid)
调参各部分的解析示意图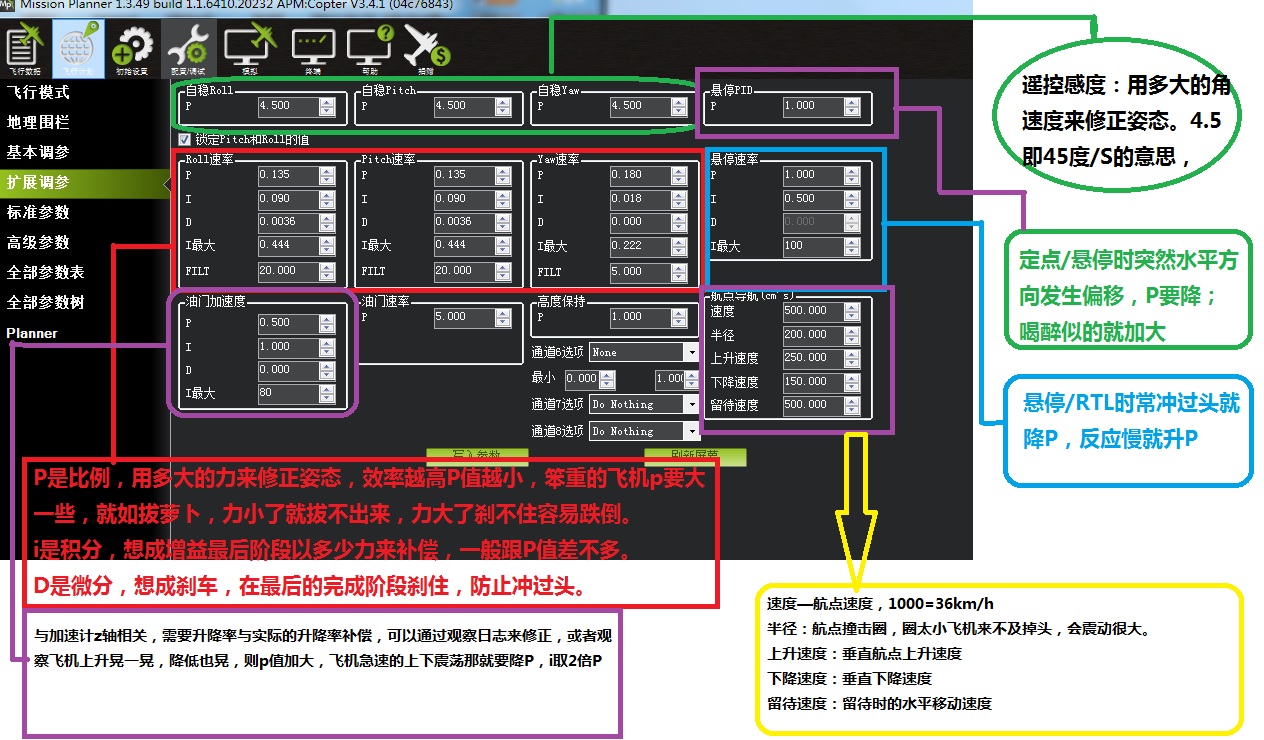 遥控感度:飞手使用遥控器操纵时飞行器的响应速度,值越大响应也越快,大的值适合穿越,小的值适合航拍,理论上效率越高的飞行器值越小,pid首先调整该参数。
遥控感度:飞手使用遥控器操纵时飞行器的响应速度,值越大响应也越快,大的值适合穿越,小的值适合航拍,理论上效率越高的飞行器值越小,pid首先调整该参数。
在飞行中调roll和pitch(以遥控输入第六通道调参为例)
首先需要在遥控器校准的时候把第六通道校准,然后设置第六通道为Rate Roll / Pitch kP,设最小值为0.08,最大值为0.20(一般飞机在该范围),点击写入。
将遥控器的ch6旋钮扭转到最小的位置,按刷新参数按钮,确保速率roll p和速率pitch P变为0.08(或非常接近)
 在自稳模式下飞行,并转动旋钮直至飞机飞行稳定而不是抖动。
在自稳模式下飞行,并转动旋钮直至飞机飞行稳定而不是抖动。