一个多旋翼无人机的系统组成
多旋翼类型
现在Ardupilot支持的多旋翼可分为:双旋翼、三旋翼、四旋翼、六旋翼、八旋翼、Y6、四旋八桨旋翼、六旋十二桨旋翼。 下面以最简单的四旋翼为例
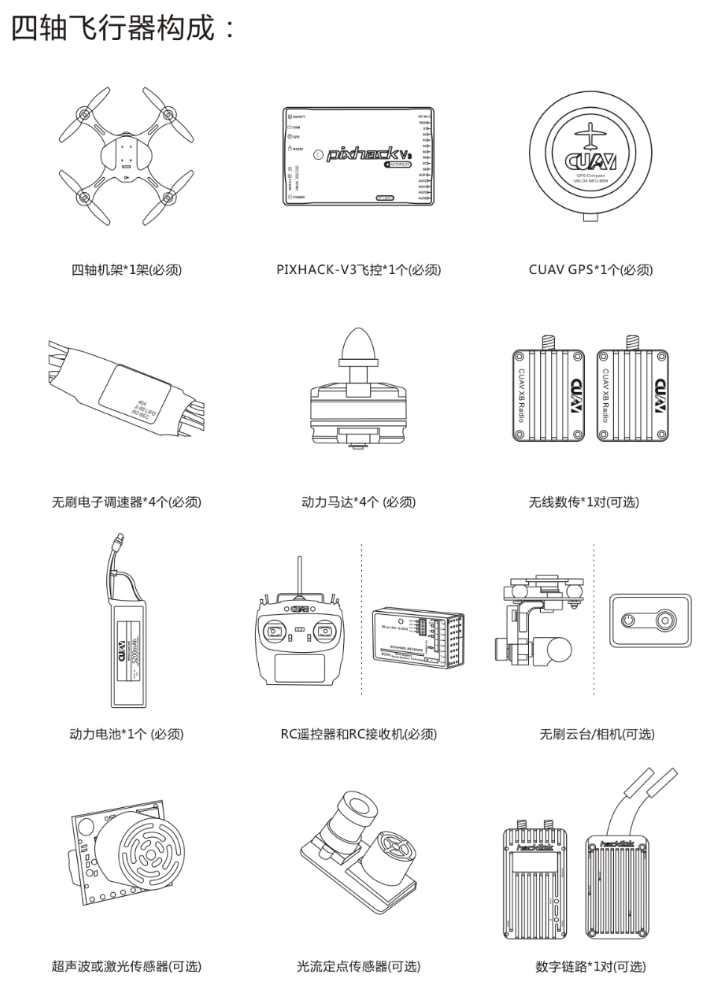
一个四轴飞行器的构成:
- 四轴机架 X1(必须)
- 动力马达 X4(必须)
- 无刷电子调速器(电调/ESC) X4(必须)
- 飞行控制器(如V5+/V5 nano) X1(必须)
- GPS(如NEO V2/C-RTK) X1(必须)
- 无线数传(Xbee/P900/Xtend/ltelink) X1对 (必须)
- 动力电池(必须)
- RC遥控器和RC接收机(必须)
- 无刷云台或者相机(可选)
- 超声波或者激光传感器(可选)
- 光流定点传感器(可选)
支持电池类型:
一般使用飞控原配的电源模块,CUAV低压版PM模块支持标准3-6S动力电池;HV PM模块支持3~12S动力电池;CAN PMU模块支持2~14S动力电池
它能飞多高多远:
飞行高度和距离视您的无人机动力和续航时间而定,需要注意的是,您需要在符合当地法律法规的前提下飞行,否则需要自行承担法律后果!
理论上:
需要实时控制能飞行的高度和距离:跟动力续航时间、遥控器或者数传通讯距离有关
自主飞行的高度和距离:跟动力、续航时间有关 通常一个多旋翼组成包括以下硬件(以四轴为例)